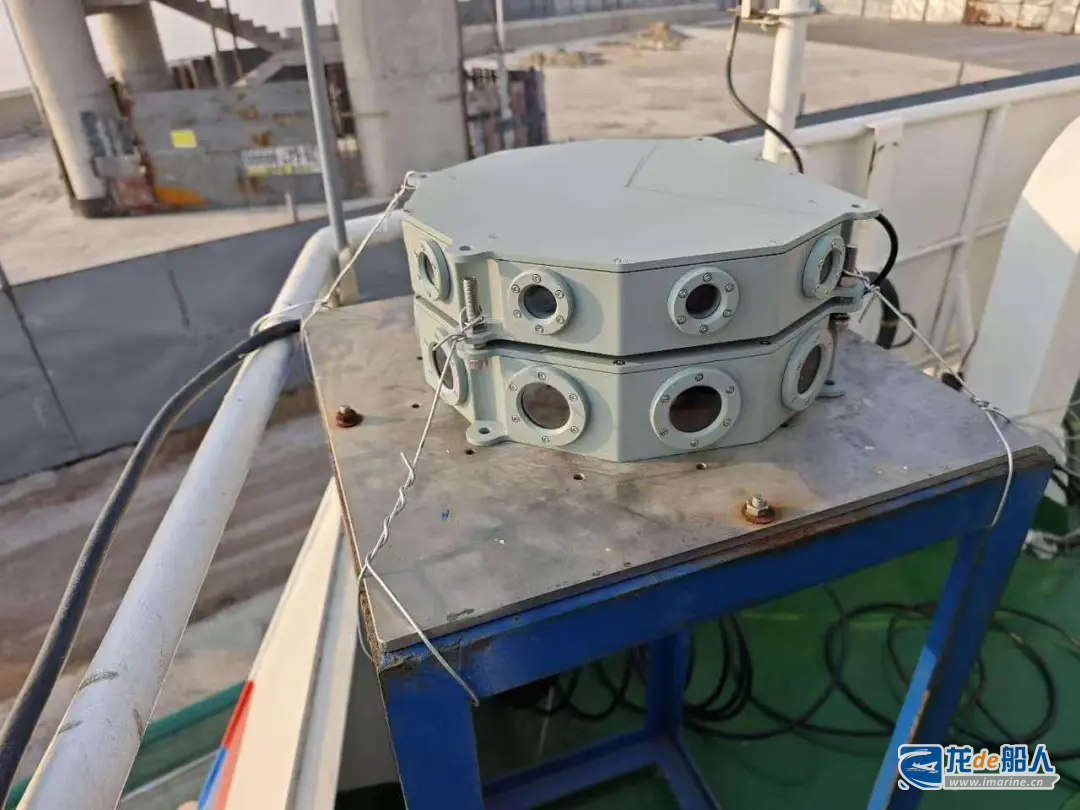
這一船舶“慧眼”是由哈爾濱工程大學智能科學與工程學院科研團隊歷經14年技術攻關所研制的高分辨率多模全景視覺系統。
據該項目負責人、哈爾濱工程大學智能科學與工程學院蔡成濤教授介紹,“我們聚焦智能視覺感知系統的關鍵難題,解決了環境感知、目標探測等技術應用領域的‘看不見’、‘看不清’和‘看不懂’三大難題。”

據悉,該研究成果在智能船舶、環境檢測、自動駕駛、智能交通等領域的視覺識別中表現出眾,成功預判并預警了數次因視野盲區所導致的船舶碰撞,已應用于全國首艘科研試驗船“海豚1”,并在多個企業的視覺航海感知系統、拖輪上的視覺自主靠離泊環境感知系統、安防監控系統中得到廣泛應用。
]]>
該規范研究和制訂由廣東海事局牽頭,聯合業界相關單位歷時三年共同完成。該規范的實施是我國無人船艇和智能船舶發展歷程中的一個重要里程碑,為推動我國無人船艇和智能船舶產業高質量發展提供堅實的技術支撐。

近年來,隨著科技發展,無人水面艇(USV)和小型智能船舶逐漸成為船舶與海洋工程和航運業的重要組成部分,展現出廣闊的應用前景。之前由于缺乏統一的測試標準和技術指導文件,市場上產品質量參差不齊,監管部門對于此類特殊類型船舶的安全性評估和管理缺乏明確依據。2022年起,廣東海事局聯合珠海云洲智能科技股份有限公司、中山大學、廣東省標準研究院等多家機構,通過深入調研國內外相關領域的最新進展和技術成果,參考國際先進經驗,結合國內實際情況,最終將《無人水面艇和小型智能船舶海上測試管理規范》制訂完成。
據悉,本規范適用于無人水面艇和小型智能船舶(船長大于等于5米且小于20米)進行自主航行或遠程控制航行測試時所涉及的各項管理工作。具體內容涵蓋基本要求、測試大綱、風險評估、測試通報、航前檢查、測試過程保障以及測試報告及數據管理等方面的規定,構建了一個完整的管理體系框架。此外,附錄中還特別增加了應急功能配置列表、航前安全檢查表等實用工具,幫助使用者更好地理解和應用標準中的各項條款。

該標準在填補國內有關管理規范空白的同時,體現了一定的創新性和前瞻性,充分借鑒了國際上已有的成功經驗和最佳實踐案例,確保與全球發展趨勢保持一致,實現了多學科交叉融合和系統性覆蓋。制訂的時候,既考慮到了當前技術水平的實際限制,又預留了一定的空間給未來可能出現的新技術和新模式。
廣東海事局船舶檢驗管理處處長彭軍陽表示,廣東海事局將持續優化海事管理服務模式,不斷深化跨區域跨部門合作,積極支持無人船、智能船舶等高端海洋新興產業發展,推動航運業向智能化、綠色化方向轉型升級,為海洋經濟高質量安全發展保駕護航。
]]>
據了解,當前海洋測繪面臨著傳統海洋船舶測繪平臺作業成本高、數據采集自動化程度低、遠程實時監測能力差等問題。為突破海洋測繪局限,長江瀘州航道局主動作為,攜“問江”型無人船跨越千里,奔赴大海開展海洋測繪測試與應用。在海區,該無人船搭載的低延時通信系統和高精度定位系統能實現自主航行,并且能將測量的數據自動、實時傳回基地。測試過程中,“問江”型無人船就像一條小魚在海面上來回穿梭、自由靈活。瀘州航道局技術人員表示,“問江”型無人船測量打破了原有海洋測繪作業方式,既縮短了作業時間、降低了作業成本、提高了作業效益,也充分展現了其在海洋領域測量的優秀綜合性能。
在耐久測試中,該型無人船自上午11時從港口出發,23時返回港口,歷時12小時,離海岸15海里,面對無網絡信號的海區,該型無人船利用大功率數傳電臺實現了遠距離數據穩定傳輸;航行過程中,在低能耗設備和高功率太陽能板的加持下,該型無人船未進行燃油加注和設備充電且無人船靠岸后仍有15%的油量和80%的電量,充分證明了該無人船的穩定性和長續航能力。航行中,無人船突遇浪高約1.0米的涌浪,其依靠優異的船體強度,根據控制算法對航行中實時環境下的速度、航向等作出調整,成功抵御了涌浪的沖擊。夜間航行返港途中,受潮汐影響,眾多漁船及工作船滯留港外,而“問江”型無人船因其0.3米的吃水,利用自身攜帶的測深儀在該淺水域“大顯身手”,成功掃測出水深較為富裕的航路,得到大家的一致好評。
據悉,為豐富無人船應用場景,“問江”型無人船還進行了60千克配重條件下的水下探測設備拖帶測試。經測試,拖帶時航速穩定在5海里每小時以上,在無人船停下后設備仍能懸浮于水中,確保了搭載設備的安全,為今后搭載水下攝像機、水質監測設備、污染物追蹤設備、魚類探測設備等打下了堅實基礎。未來,該無人船將能應用于海洋漁業資源調查與保護、海岸線勘測與維護、水環境監測與評估、海上風力發電場運維等場景。
下一步,長江瀘州航道局將繼續堅持科技創新,不斷優化無人船應用場景,立足市場需求,持續為行業提供高水平、高效率、高標準的無人船產品。
來源:長江瀘州航道局
]]>
除“Yara Birkeland”號之外,目前,康士伯海事正與挪威企業Asko合作,在奧斯陸峽灣開發另外兩艘電池驅動的自動駁船,并將在奧勒松附近開發第四艘小型集裝箱船。對于航運公司而言,“無人船”可大幅提升航運管理水平,進一步擴大載貨空間,大幅節省船運成本。一個團隊可以同時管理多艘無人船,且船員安全得到進一步保障。同時,由于船上無需配置生活區、廚房、暖氣、空調和其他系統,船舶將擁有更多的載貨量,最終降低船隊貨運成本。未來“無人船”發展具有巨大潛力。
來源:中國船舶經研中心
]]> 圖源:江南造船(零件自由邊智能倒角)
圖源:江南造船(零件自由邊智能倒角)
作為人工智能領域的首部省級地方法規,備受業內關注。整體內容包括總則、基本要素與科技創新、產業發展、應用賦能、產業治理和附則共六章七十二條。內容涉及船海產業智能化發展方向的有:
《條例》提出,鼓勵無人船產業發展,完善無人船電子航道測繪、智能航運通信等保障體系,在特定區域開展無人船航道測試。
《條例》指出,推動人工智能、信息技術與制造業深度融合創新,推動智能制造關鍵技術裝備、核心支撐軟件、工業互聯網等系統集成應用。支持企業通過促進產業高質量發展專項政策開展技術改造升級,促進制造業數字化、智能化轉型。
《條例》明確,推動人工智能在經濟、生活、城市治理等領域的規模化應用,加快數字化轉型,鼓勵各相關組織采用產品租賃、服務采購、系統集成、融資租賃等方式,利用人工智能技術和產品開展研發、制造、服務、管理等業務。
]]>由于美國海岸警衛隊禁止無人船在沿海地區作業,該船最后40公里航程被拖航完成,最終完成靠泊。

據稱,“五月花”號成為完成橫跨大西洋的最大的無人自主船。該項目由非營利性海洋研究組織ProMare于2016年發起,IBM是該項目的主要技術合作伙伴。
在經過兩年時間的設計、建造和AI模型訓練,“五月花”號于2020年9月下水。
“五月花”號長15米,寬6.2米,最高航速10節。該船安裝了6個AI相機、30多個傳感器和15個邊緣設備,這些硬件輸入數據都提供給依靠IBM自動化、人工智能和邊緣計算技術創建的“AI船長”解釋和分析。
項目技術團隊稱,來自傳感器的數據和系統程序使“AI船長”可以遵守海事法規,同時做出關鍵的瞬間決定,如在危險區域或海洋動物旁邊改變航線,所有操作都不需要人類互動或干預。
此外,“AI船長”能不斷從數據中學習,推測替代選擇,評估和優化決策,同時管理風險以完成航行。IBM表示,“AI船長”的決策過程都有透明的記錄,可以幫助人類理解船長做出的某些決定。
“五月花”號于2021年曾試圖橫渡大西洋,但因機械故障被取消。本次自主航行是第二次嘗試橫渡大西洋。
該船今年4月從英國出發,但仍然出現了很多機械問題,航行監測團隊6月時決定改道加拿大哈利法克斯。
6月27日,“五月花”號離開加拿大,在沒有船員的情況下完成了最后一段大約3900海里的航行。

“無人船的航行剛剛開始,”IBM負責網絡和邊緣計算的首席技術官Rob High認為,本次無人自主航行獲得的經驗將使AI系統獲得更多進步,并有助于最終將該技術添加到商業船舶中, “船員的生活將更輕松”。
該型救援船適用于惡劣的海洋環境,可以應用于海工和海上
風電領域。兩家合作公司認為,這類船舶可以大幅提高海上的救援能力。
對于海上人員來說,海上設施是一個危險的工作環境,人員有落水的風險。Zelim公司認為,在很多海上設施上,傳統的搜救方式不再適用。
隨著海工項目距離海岸的距離越來越遠,傳統的海上支持服務失去了效率。許多海上風力發電場位于救援船舶的正常作業區域之外,救生艇可能需要幾個小時才能到達緊急救援地點,甚至救援直升機也需要一個多小時才能到達這些地點。
為了解決這些問題,Zelim和Chartwell聯合開發了 “幸存者”(Survivor)無人救援船。
 這種無人船為遠程操控方式,安裝部署在海工結構上(類似商船上的救生艇),可以根據需求下落到水中。在接觸到水之前,安裝在船上的兩個噴水式推進器將被激活,防止救援船向后漂流撞到海工結構,并保證惡劣海況下的安全性。據稱,這種救援船可以在最高4.5米的海浪下運行。
這種無人船為遠程操控方式,安裝部署在海工結構上(類似商船上的救生艇),可以根據需求下落到水中。在接觸到水之前,安裝在船上的兩個噴水式推進器將被激活,防止救援船向后漂流撞到海工結構,并保證惡劣海況下的安全性。據稱,這種救援船可以在最高4.5米的海浪下運行。
該船還配有可以從水中救助落水人員的救援傳送裝置、易開門把手、空調艙以及直升機接機區等。
據稱,船舶設計公司Seaspeed Marine Consulting已對這一設計概念進行了模型測試和驗證。
]]>2019年6月,國際海事組織(IMO)在第101次海上安全委員會上(MSC 101),審議并通過了《水面自主船舶試航暫行導則》(以下簡稱《導則》)。大會鼓勵各締約國參考本暫行《導則》,根據本國的實際情況,組織自主船舶的海上測試,并根據實際試航實踐,對本暫行《導則》提出完善提案,以便為《導則》的發布提供有力支撐。
廣東海事局聯合中國船級社和云洲智能組織了《導則》在中國的驗證測試。項目組基于云洲智能與武漢理工大學設計制造的“筋斗云0號”自主貨物運輸船的試航實踐,在中華人民共和國交通運輸部海事局的指導下,完成了自主船舶試航報告,并提交國際海事組織。
2021年8月,國際海事組織完成審查工作,在其官網上發布了來自中國的試航報告提案,中國智慧在國際海事界再次得到彰顯。
提案以廣東海事局主持開展的“筋斗云0號”無人船試航實踐為基礎,全面涵蓋遠程控制、自動循跡、自動避碰等智能航行技術要素,從試航風險評估、基礎設施、試航人員配備及資質、通信和數據交換、航行標識、信息共享、安全責任等多個方面提出建設性的建議,為《導則》的完善和修訂提供了有力的實證,同時也為自主船舶正常航行安全監管制度的建立打下堅實的基礎,為推動自主船舶商業化運營做出了有益探索。
共i的:科技日報
]]>