為確保風力渦輪機或油氣生產設備等海上基礎設施的安全,定期檢查和維護是必不可少的。然而,水下作業不僅復雜、成本高同時潛水員也要面臨相當大的風險。目前已經開始使用遠程無人潛水器(ROV)來監測海上設備的狀況。
而DFHI最新的方案是采用自主AUV,AUV可以在水中停留很長一段時間,自主系統實現了水中自主操作,同時在必要時也可以進行遠程控制。
Mare-I項目中,來自IT、機器人、驅動技術及海工領域的多家公司和研究機構設計并建造了自主水下機器人“墨魚號”。
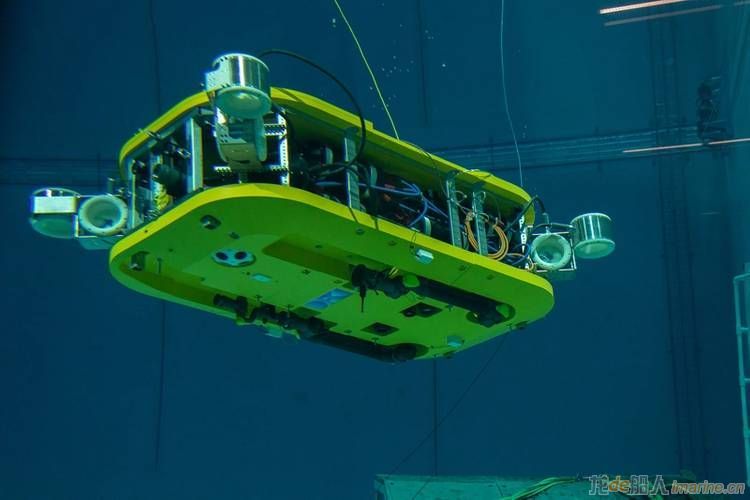
作為一種干預式水下機器人,“墨魚號”可以在水中自由定位,并具備兩個連接至其腹中部的深海抓握系統,幫助在水下操縱物體。借助于特殊的設計和人工智能控制系統,“墨魚號”還可以在潛水過程中改變重心和浮力,使操作穩定或保持任何方向。
 雙臂自主水下機器人“墨魚號”在位于不來梅的DFKI海洋探索館下水
雙臂自主水下機器人“墨魚號”在位于不來梅的DFKI海洋探索館下水
除了完全自主操作外,這種水下機器人還可以通過使用光纖電纜以混合模式運行。在混合模式下,監控人員可以在水下機器人工作的關鍵節點對機器人進行干預和遠程控制。為此,除配有操縱器外,系統還配有許多用于環境感知的傳感器,如聲納傳感器、照相機、激光掃描儀及磁力計等。
為了有效地處理大量的傳感器數據,研究人員開發了一種特殊的架構概念,可以直接對機器人進行數據流的分散分析。位于不來梅的研究人員還負責執行檢查和維修任務的計劃。此外,他們還開發了一種標準接口,可以實現自主水下機器人、控制站和內部業務基礎設施之間的雙向數據交換。
由DFKI的認知輔助系統研究部門開發的虛擬自動駕駛功能在執行遠程控制任務時為控制站的人員提供支持。因此,該系統配備了微軟的HoloLens,既可以與控制站結合使用,也可以作為一種單獨的輕量交互媒介,如與船舶進行交互等。
操作人員可以隨時通過控制臺的顯示器了解AUV和水下結構的狀態。顯示器可以顯示傳感器信息和測量到的數據,同時通過自然語音交互來發出警告。自主水下機器人和攝像機還可以通過語音命令來控制。
Mare-IT項目中,DFKI嵌入智能研究部門還開發了一個APP,作為交互技術的補充。該APP可以通過智能手機或平板等移動設備來控制自主水下機器人或更改參數設置。此外,研究人員還研究了利用人工振蕩磁場來定位水下機器人的可能性。
該AUV采用了WITTENSTEIN cyber motor GmbH生產的高強度推進器。推進器的推力達500牛頓,適用于最深6000米的海水環境。推進系統采用特殊的罐封技術,防止對環境的化學危害。與推進器配套的伺服逆變器包括與推進器馬達特別匹配的無傳感器控制器,在兩個轉向區間和整個轉速至停止范圍內提供準確、高動態的速度控制。這種AUV配備了8個推進驅動器。
Mare-IT 項目獲得了德國聯邦教育和研究部門約550萬歐元的資助。
]]>Sonardyne表示,全新Navigator版本拓展了去年推出的Guidance版本的功能,除了可以計算并提供遠程自主船舶、有人駕駛水下船舶或無人水面船舶的位置外,還可以提供船舶的速度、深度和高度數據。

Sonardyne表示:“SPRINT-Nav Mini體積小、功率低,可以為無法安裝高端導航系統的船舶及平臺提供準確、精確和強大的導航,并實現測量和檢查功能。適用于在淺水作業的帶有觀察功能的遙控潛水器(ROV)、低后勤功能的水下機器人(AUV)、載人潛水器、人員運載器以及無人水面艇(USV)。”
該公司表示,Mini系列產品將INS、AHRS、壓力傳感器以及500 kHz的DVL(多普勒速度儀)組合在一個高215毫米、直徑149毫米、重0.7KG的防水外殼中。與同類型的其他技術相比,這種解決方案更小、更輕、功率更低,而且比其替代的船舶傳感器的成本更低。
該設備可以在300米至4000米的深度使用。
]]>本次檢驗由法國BV船級社代表船旗國(法國)來實施,檢查了整艘船的船底完整性。這種高效的船舶水下檢查在海運業中扮演著越來越重要的角色,可以替代船舶在約定日期的靠港檢驗,或偶爾的船體破損檢驗。

BV的檢驗人員在船上遠程控制一架ROV進行水下檢測。此外,BV使用MaDfly提供的全高清實時視頻片斷,對BV 的遠程檢驗方案進行了測試,這使得BV可以在不配備船上檢驗人員的情況下,使用直播、視頻、音頻錄制以及拍照等方式來完成遠程檢驗。
BV表示,這種檢驗在全球來說是首次。
使用這一系統,BV表示可以帶來以下好處:
- 潛水員不必進入水中,操作更安全;
- 僅需一個操作人員及有限的設備,縮短了準備時間;
- 水下機器人拍攝的照片質量高;
- 降低干擾船舶運營的風險。
在2021年4月30日舉辦的一場在線會議中,共有九家公司參與了綜合集成自主水下監測解決方案(CIAM)項目的合作開發。德國聯邦議院議員以及德國海運業政府協調員Norbert Brackmann介紹了政府的投資決定。

在一場線上活動中,ROSEN集團總裁Hermann Rosen(左一)、德國海事行業政府部門協調員Norbert Brackmann(右上角),以及CIAM項目九個參與方的代表們 /ROSEN集團供圖
Brackmann表示:“很高興今天能夠批準這一全新海洋技術項目。這一項目不僅體現了海運業高創新性的實力,還體現了大公司、小公司、知名大學及研究機構之間的良好合作。作為未來增長型行業,海運業正在積極塑造海洋能源轉型并加大研發方面的投資。未來CIAM船舶預計可以達到相對較長的運營周期,可以進行深海作業,重量較輕,這也將是德國海洋技術的一大進步。通過管道和海底電纜檢測方面的創新技術,我們也將增強在國際市場上的地位。”
作為該項目的一部分,無人自主化潛水機器人系統將使用人工智能進行控制。潛水機器人的開發和建造用于監測水下設備和基礎設施,如油氣管道、氫管道、可再生能源電纜、通信電纜,并防止這些資產受損。
具體而言,CIAM項目旨在解決無人潛水器的一個關鍵問題:迄今為止,水下機器人需要大型支持船,花費較高;此外,水下機器人在海上的使用及撤回的風險較高。
除Rosen集團外,這一項目還包括三所知名大學、兩家研究機構以及三名來自Rostock、Schwerin和Karlsruhe的技術專家,組成了項目合作伙伴。Rosen集團水下資產完整性全球市場策略負責人Gunnar Brink博士將負責這一項目的協調工作。
CIAM項目團隊包括:
- Rosen集團,完整性流程鏈各方面解決方案的提供商;
- FormLED GmbH,一家專門從事電氣技術開發的年輕技術公司。在CIAM項目中,該公司將主要負責潛水器中性壓力子組件的開發及優化解決方案;
- INNOMAR – 近20年來,一直為船舶和海洋應用提供設備和軟件服務的公司。在CIAM項目中,該項目主要優化沉淀物回聲探測器的尺寸、重量、能源需求、抗壓能力以及水下機器人的操作模式;
- balticFuelCells GmbH將專注于水下機器人的燃料電池系統。該公司將專注于燃料電池的開發,并將其整合至燃料電池系統中;
- 德國人工智能研究中心(DFKI),將負責遠程水下機器人系統的指揮和控制;
- 柏林科技大學,將專注于水下機器人的對接、充電及數據傳輸;
- 漢堡海芬城大學(HafenCity University Hamburg),將專注于慣性導航系統的開發,以及水下系統的自主對接方法;
- 弗萊堡大學醫學中心將專注于電場傳感器的開發,應對惡劣的水下環境,并對高敏感腐蝕保護進行測量;
- 基爾亥姆霍茲海洋研究中心專注于現代海洋科學方面的研究。該機構將開發水下機器人攝像系統,并為系統提供測試平臺。
風電項目的開發。臺灣金屬工業研發中心(MIRDC)將使用水下遙控機器人,來協助渦輪機水下結構的開發和維護。
該設備的培訓將由臺灣金屬工業研發中心在海洋技術創新中心進行。該中心由臺灣能源局和經濟部為培養海上風能人才而設立。
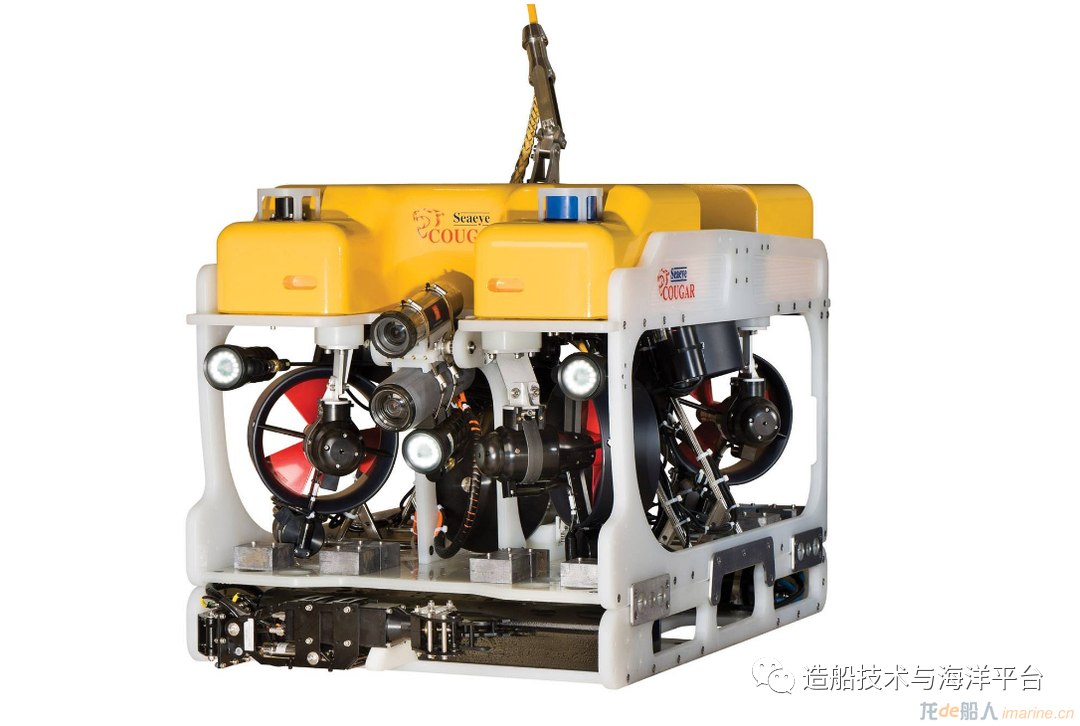 Saab Seaeye Cougar XT緊湊型水下遙控機器人
Saab Seaeye Cougar XT緊湊型水下遙控機器人
Seaeye 小型300m Cougar XT緊湊型機器人專為惡劣的淺水操作環境而打造,特別的設計將洋流的影響降到最低,同時減小了邊框尺寸、浮力以及重量。此外,該裝置還使用了更輕薄的17毫米系繩電纜,降低了阻力。
Cougar配有六個推進器,這種設計可以幫助設備在交叉強水流中保持穩定,并使其能夠以精確的機動性在水下建筑物周圍操作,同時還可以處理多種設備,包括攝像機、聲納、追蹤系統和控制器。
臺灣金屬工業研發中心的Cougar XT緊湊型水下機器人配備Kongsberg彩色變焦相機、Blueview多波束聲納、Tritec SeaKing側邊掃描聲納、Cygnus超聲波厚度計、CP接觸探頭以及一個具有四種功能的機械手。它還可以進行自由泳,并擁有專屬的16英尺控制艙。
]]>