


由德國人工智能研究中心(DFHI)領導的一家聯盟在Mare-IT項目中開發了一種可用于復雜檢查和維護任務的自主雙臂水下機器人(AUV),AUV可以進行直觀的控制和監測,同時還能與操作人員實現有效的信息交流。
為確保風力渦輪機或油氣生產設備等海上基礎設施的安全,定期檢查和維護是必不可少的。然而,水下作業不僅復雜、成本高同時潛水員也要面臨相當大的風險。目前已經開始使用遠程無人潛水器(ROV)來監測海上設備的狀況。
而DFHI最新的方案是采用自主AUV,AUV可以在水中停留很長一段時間,自主系統實現了水中自主操作,同時在必要時也可以進行遠程控制。
Mare-I項目中,來自IT、機器人、驅動技術及海工領域的多家公司和研究機構設計并建造了自主水下機器人“墨魚號”。
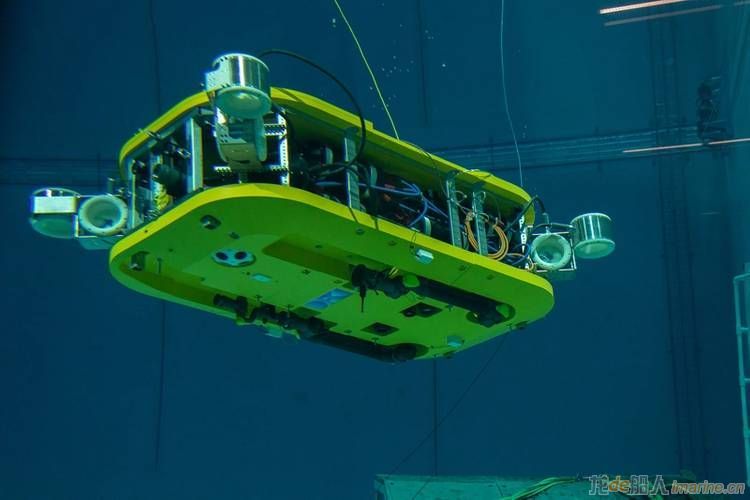
作為一種干預式水下機器人,“墨魚號”可以在水中自由定位,并具備兩個連接至其腹中部的深海抓握系統,幫助在水下操縱物體。借助于特殊的設計和人工智能控制系統,“墨魚號”還可以在潛水過程中改變重心和浮力,使操作穩定或保持任何方向。
 雙臂自主水下機器人“墨魚號”在位于不來梅的DFKI海洋探索館下水
雙臂自主水下機器人“墨魚號”在位于不來梅的DFKI海洋探索館下水
除了完全自主操作外,這種水下機器人還可以通過使用光纖電纜以混合模式運行。在混合模式下,監控人員可以在水下機器人工作的關鍵節點對機器人進行干預和遠程控制。為此,除配有操縱器外,系統還配有許多用于環境感知的傳感器,如聲納傳感器、照相機、激光掃描儀及磁力計等。
為了有效地處理大量的傳感器數據,研究人員開發了一種特殊的架構概念,可以直接對機器人進行數據流的分散分析。位于不來梅的研究人員還負責執行檢查和維修任務的計劃。此外,他們還開發了一種標準接口,可以實現自主水下機器人、控制站和內部業務基礎設施之間的雙向數據交換。
由DFKI的認知輔助系統研究部門開發的虛擬自動駕駛功能在執行遠程控制任務時為控制站的人員提供支持。因此,該系統配備了微軟的HoloLens,既可以與控制站結合使用,也可以作為一種單獨的輕量交互媒介,如與船舶進行交互等。
操作人員可以隨時通過控制臺的顯示器了解AUV和水下結構的狀態。顯示器可以顯示傳感器信息和測量到的數據,同時通過自然語音交互來發出警告。自主水下機器人和攝像機還可以通過語音命令來控制。
Mare-IT項目中,DFKI嵌入智能研究部門還開發了一個APP,作為交互技術的補充。該APP可以通過智能手機或平板等移動設備來控制自主水下機器人或更改參數設置。此外,研究人員還研究了利用人工振蕩磁場來定位水下機器人的可能性。
該AUV采用了WITTENSTEIN cyber motor GmbH生產的高強度推進器。推進器的推力達500牛頓,適用于最深6000米的海水環境。推進系統采用特殊的罐封技術,防止對環境的化學危害。與推進器配套的伺服逆變器包括與推進器馬達特別匹配的無傳感器控制器,在兩個轉向區間和整個轉速至停止范圍內提供準確、高動態的速度控制。這種AUV配備了8個推進驅動器。
Mare-IT 項目獲得了德國聯邦教育和研究部門約550萬歐元的資助。