



作者:劉佳侖1, 2,楊帆3,李詩杰3,關宏旭4
1. 武漢理工大學 智能交通系統研究中心,湖北 武漢 430063 2. 國家水運安全工程技術研究中心,湖北 武漢 430063 3. 武漢理工大學 交通與物流工程學院,湖北 武漢 430063 4. 武漢理工大學 航運學院,湖北 武漢 430063
摘 要 :
近年來面向自主水面船舶的智能化技術研發與示范發展迅速,但整體水平仍處于初級階段。2018年起國際海事組織海事安全委員會逐步明確了自主水面船舶(MASS)的概念及等級,發布了《自主水面船舶試航暫行指南》,逐步確定了國際自主水面船舶的研究方向,對世界智慧航運與智能船舶的發展具有重要的意義。
本文總結了自主水面船舶等級定義和試航導則,梳理了自主水面船舶測試驗證評估技術研究現狀,最后對虛實融合的自主水面船舶測試驗證評估的內涵、方法體系及關鍵技術進行論述。
關鍵詞:自主水面船舶;虛實融合;測試驗證評估;MASS試航導則
『 引 言 』
自2012年起,國內外船舶工業和航運業對自主水面船舶的關注持續上升,國際主要船級社先后發布了相關規范和指導性文件。2017年6月,國際海事組織(International Maritime Organization,IMO)第98屆海事安全委員會將自主水面船舶(Maritime Autonomous Surface Ships,MASS)正式列入議程,2018年4月,第99屆海事安全委員會明確了發展自主水面船舶,并啟動相關法規的梳理和修訂工作。自此,自主水面船舶正式邁向世界舞臺。
1『 自主水面船舶等級定義和試航導則 』
圍繞船舶自主水平分級,各國積極參與研究并發布了各自的分級標準,主要包括英國勞氏船級社、挪威自主船舶論壇、丹麥海事局、英國海事自主系統規范工作組、法國船級社、比利時航道管理局以及國際海事組織[1]。
國際海事組織第100屆海事安全委員會會議上,采用了丹麥海事局對船舶自主水平的分級標準[2],將自主水面船舶的自主程度分為配備自動系統和輔助決策的船舶、有船員在船的遠程控制船舶、無船員在船的遠程控制船舶和完全自主船舶4個等級,并強調自主水面船舶在航行期間可以一個或多個自主程度航行,如表 1 所示。
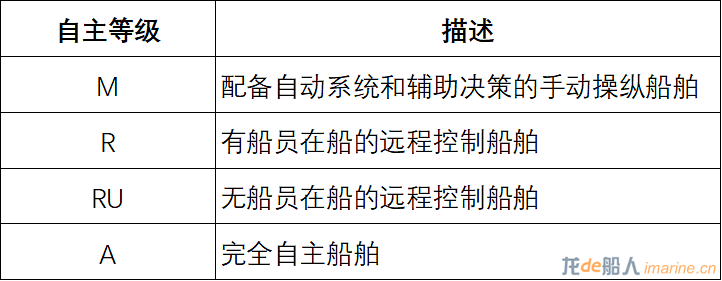 表1:國際海事組織船舶自主等級分級標準
表1:國際海事組織船舶自主等級分級標準
2019年6月,IMO發布了《自主水面船舶試航暫行指南》,批準在滿足“遵守相關強制性文件,采取適當的風險管理措施,明確試航范圍與目標,向主管機關報告,選擇具備適當資質的配員,提供保障安全試航的基礎設施,確保通信、數據、信息實時共享與網絡安全”等條件下可開展自主水面船舶試航實驗。該指南明確了自主水面船舶的試航要求,以保障其試驗的安全和效率。
2『 自主水面船舶測試驗證評估技術研究現狀 』
由于船舶的高風險與高附加值屬性,除非自主水面船舶的可靠性和安全性能夠得到完整的、系統的、徹底的測試、驗證、評估和保障,否則無法將其投入到工業應用。傳統船舶性能測試主要包括虛擬仿真和模型實驗、實船實驗三種方式。模型實驗又可細分為水池實驗和外場實驗。通常在設計過程中利用傳統虛擬仿真預測相關性能,在優選設計方案后開展模型實驗評估其可行性以更新建造方案,最后通過船舶交付的試航實驗對實船性能做定性判斷與定量分析測試。
虛擬仿真成本低、零風險、可定制、可加速、可重復,但研發成本較高、準確性存疑、缺少真實反饋。傳統的虛擬仿真測試技術主要是通過船舶駕駛模擬器仿真技術,利用虛擬現實技術營造虛擬的駕駛環境,通過操控模擬器與虛擬環境進行交互,從而進行船舶駕駛操作訓練。康斯伯格公司和瓦錫蘭公司在船舶模擬器領域具有深厚的技術與數據積累,為海事教育、培訓和研究等方面提供了一系列技術支持。
2018年12月,羅·羅公司與Finferries在在芬蘭帕爾加斯和瑙沃之間成功完成了渡輪Falco的按照設定航線的自主航行和遠程駕駛試驗。2019年9月,日本郵船公司(NYK)在“Iris Leader”號上對各海試項目進行了測試驗證,并于2020年12月在東京灣內對400公里以外的拖輪進行了遠程操控測試。2020年4月,韓國自主水面船舶項目開啟,智能航行系統驗證與確認技術是該項目的研究目標之一,旨在研究虛擬測試場構建、實海域測試以及系統性能測試評估并形成標準化體系。
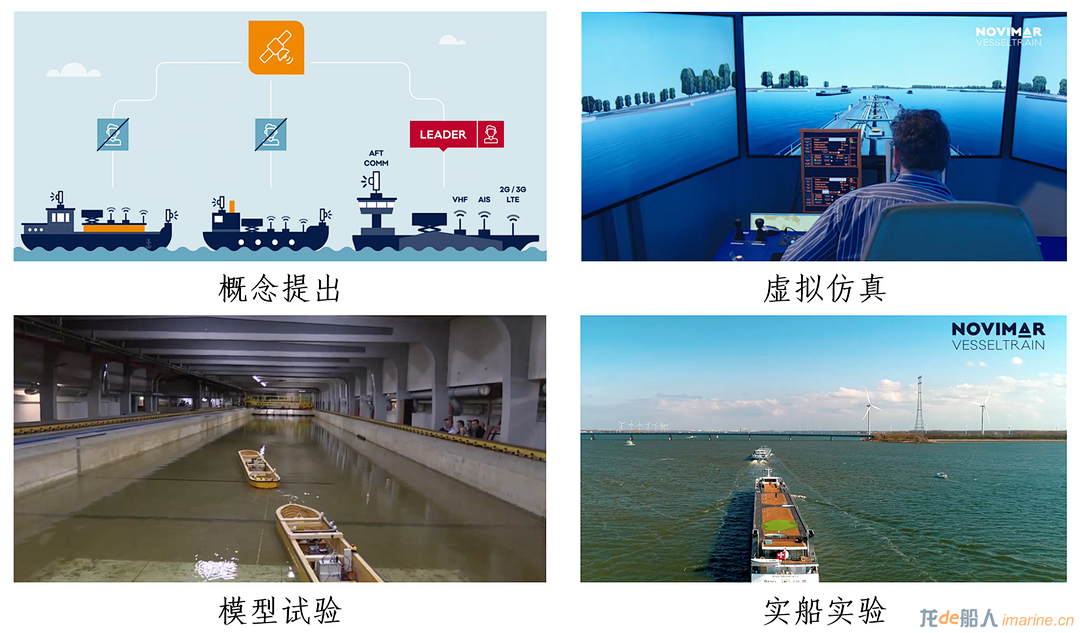 圖1:NOVIMAR項目測試驗證邏輯與方法
圖1:NOVIMAR項目測試驗證邏輯與方法
值得一提的是歐盟H2020的NOVIMAR項目,項目旨在研究船舶編隊航行。如圖 1 所示,該項目從編隊航行概念的提出、虛擬仿真邏輯的設計,到模型試驗的實現、實船驗證的示范,形成了整個測試驗證評估過程的模式化示范,對自主水面船舶相關能力的測試驗證評估研究具有重要的借鑒價值。
3『 虛實融合的測試驗證評估技術研究 』
中國船級社于2016年和2018年分別正式發布了《智能船舶規范》[3]和《自主貨物運輸船舶指南》[4],并于2020年3月1日更新了《智能船舶規范》,對智能船舶八大功能模塊進行擴展與細化,明確了相關功能定義與技術要求。然而自主水面船舶測試驗證評估仍面臨一系列科學問題,包括安全問題、效率問題、成本問題、覆蓋問題、真實問題以及應急問題,且虛擬仿真、模型試驗、實船試驗存在各自的優缺點,單一測試手段難以滿足需求。
3.1 虛實融合測試驗證評估的內涵
測試驗證評估包含測試、驗證和評估三個方面的內容:
- 測試:測有無,用來判斷被測對象是否具備某項功能;
- 驗證:驗對錯,用來判斷被測對象能否達成某項功能;
- 評估:評好壞,用來從智能、效能和故障響應等角度去判斷被測對象的性能。
在測試的功能層面,具體應包括航路規劃測試、航速推薦測試、航向保持測試、航跡跟蹤測試、避碰決策測試、網絡通訊測試等;由功能層面進一步生成測試的任務層面,包括自主離泊、自主航行、路徑規劃、避碰控制、自主靠泊等一系列任務。基于功能與任務測試的結果,需要從方法層面去驗證被測對象的功能達成與否,包括運動模型驗證、規劃算法驗證、控制算法驗證、航行區域適應性驗證、控制對象適應性驗證等。最終,面向船舶智能航行能力,應從系統綜合性能層面去評價被測對象,包括算法準確性評價、功能切換性評價、航行經濟性評價、控制鎮定性評價以及系統容錯性評價等。
3.2 虛實融合測試驗證評估方法體系
雖然純虛擬仿真測試可以在低成本、高效率、零風險的前提下對自主水面船舶航行理論與控制算法進行研發與測試,但在一定程度上存在真實性問題,包括測試場景的真實性、數據來源的真實性、船舶動力學仿真的真實性。模型測試和實船測試雖然可以真實的反應船舶的實際航行工況,但存在安全性、經濟性、低效性、可重復性等諸多問題。因此,以虛實融合測試為主體,虛擬測試為先導,模型測試為中試,實船測試為校驗的測試驗證評估體系是自主水面船舶測試的必然選擇。
虛實融合測試方法中的“實”指模型船/實船、實際航道環境及實際交通流信息;而“虛”指虛擬船舶、虛擬航道環境及虛擬航行場景[5]。利用數字孿生技術將模型船/實船姿態信息與狀態信息離線或實時映射至虛擬船舶,同時構建基于真實航道環境信息與航行場景信息的虛擬仿真空間,在所構建模型船/實船的高精度船舶運動模型基礎上,實現虛實融合的自主水面船舶測試驗證評估。
3.3 虛實融合測試驗證評估關鍵技術
虛實融合測試驗證評估關鍵技術可以歸納為五項:
自主航行系統構建、多維數字孿生建模、多源異構數據融合、虛實融合信息交互以及人機共融評估評價。
- 自主航行系統是虛實融合測試驗證評估的對象。自主航行系統應當是包括環境感知與認知、場景識別與理解、系統決策與控制以及信息交互與協同等關鍵功能組分在內的人工智能集合體;
- 船舶多維數字孿生建模包括船舶物理模型建模、船舶運動模型建模、船舶航行環境建模、航行交通流信息建模等,利用數字孿生技術可以實現真實船舶向虛擬船舶的投影,通過真實船舶提供的各種實際數據,實現虛擬和物理的聯動;
- 多源異構數據包括船舶自身數據信息和船舶周圍環境信息,利用多傳感器數據融合技術,提升系統對船舶航行狀態感知的精度,協同實現對航行水域的全方位感知與監管;
- 虛實融合信息交互是指虛擬仿真環境與真實物理環境之間進行實時的通信、交互和協同,以實現有效的虛實聯動;
- 人機共融評估評價指利用人機共融的手段對船舶自主航行系統進行綜合能力的定性評估和定量評價。
4『 總 結 和 展 望 』
在新一輪科技革命和產業變革蓬勃興起的背景下,為了響應船舶智能化發展需求,亟需進一步促進企業、高校、科研院所等機構與國際海事組織的緊密交流與深度合作。使用模型船或實船開展測試驗證評估技術研究成本高、效率低、風險高,而純虛擬仿真的真實性存疑。因此,虛實融合的自主水面船舶測試驗證評估技術研究是迫切且必要的。
當前,在虛實融合測試體系的架構設計、試驗方法、驗證手段和評估標準等方面仍然需要開展大量的研究性與論證性工作,以支撐自主水面船舶系統、裝備的研發、測試、定型及檢驗。
參考文獻: [1]周翔宇,吳兆麟,王鳳武,劉正江.自主船舶的定義及其自主水平的界定[J].交通運輸工程學報,2019,19(06):149-162. [2]Authority Danish Maritime. Analysis of Regulatory Barriers to the Use of Autonomous Ships Final Report[J]. 2017. [3]中國船級社. 智能船舶規范[R]. 2020. [4]中國船級社, 自主貨物運輸船舶指南, 2018. [5]劉佳侖,楊帆,馬楓,嚴新平.智能船舶航行功能測試驗證的方法體系[J].中國艦船研究,2021,16(01):45-50.





