


韓國海洋大學(National Korea Maritime & Ocean University)的一個研究團隊開發出一種可優化船舶自主導航系統的新型控制方法。該研究團隊表示,現有的船舶控制系統使用的是海上自主水面艦艇(MASS)模型預測控制(Model Predictive Control,MPC)方法,沒有考慮實際海況下作用在船舶上的各種力。
針對該問題,該研究團隊在一項新研究中開發了一種新型時間優化控制方法,該方法考慮到了作用在船舶上的實際波浪載荷,從而能夠有效地規劃和控制海上MASS。
研究團隊指出,設計一種時間效率高的船舶操縱控制系統是自主船舶控制領域最困難的挑戰之一。雖然已有許多研究對這一問題展開調查,并提出了包括MPC在內的各種控制方法,但大多數研究都側重于平靜水域的控制,而平靜水域并不代表真實的運營條件。海上航行期間,船舶不斷受到不同外部負載的影響,其中海浪負載是影響操縱性能的最主要因素。
據介紹,該型控制系統的核心是一個綜合船舶數學模型,該模型考慮了作用在船體、螺旋槳和方向舵等船舶關鍵部件上的海洋中的各種力,包括波浪載荷。然而,該模型不能直接用于優化操縱時間。為此,研究團隊開發了一種新型時間優化模型,將數學模型從時間表述轉化為空間表述。據稱,此舉成功地優化了操縱時間。
這些模型被集成到非線性MPC控制器中,以實現時間優化控制。研究團隊通過模擬在不同波浪載荷下航行的真實船舶模型,旨在對控制器進行測試。
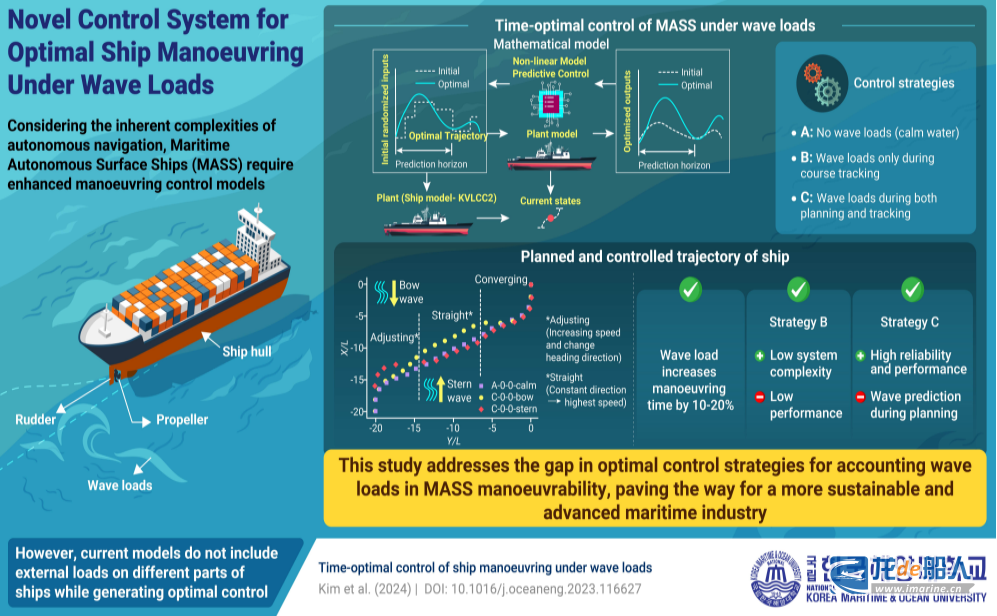
此外,為實現有效的航向規劃和跟蹤,研究團隊提出了三種控制策略:策略A——在規劃和跟蹤階段都不考慮波浪載荷,作為參考;策略B——僅在規劃階段考慮波浪載荷;策略C——在兩個階段都考慮波浪載荷,測量其對推進和轉向的影響。
實驗結果表明,波浪載荷增加了策略B和策略C的預期操縱時間。對比兩種策略,研究人員發現策略B比策略C更簡單,性能更低,而策略C更可靠。然而,由于策略C在規劃階段加入了波浪載荷預測,因此給控制器帶來了額外負擔。
該研究團隊相關人員表示:“總體而言,此次研究填補了自主船舶操縱領域的一個關鍵空白,有助于發展技術更先進的海運業。該方法不及能夠提高船舶自主運行的效率和安全性,并有可能降低航運成本和碳排放,從而惠及各個經濟領域。”
長期以來,船舶海上操縱研究一直是航運業的核心。隨著遠程控制、通信技術和人工智能的快速發展,MASS概念已成為自主海上航行的一種前景廣闊的解決方案。





